Một cảm biến quang điện, hoặc ảnh mắt, là một thiết bị được sử dụng để khám phá khoảng cách, sự biến mất, hoặc sự hiện diện của một vật bằng cách sử dụng một máy phát ánh sáng, thường là hồng ngoại, và một máy thu quang điện. Chúng được sử dụng rộng rãi trong sản xuất công nghiệp. Có ba loại hữu ích khác nhau: opposed (through beam), retro-reflective và cảm biến tiệm cận (khuếch tán) proximity-sensing (diffused).
Phân loại: Có bao nhiêu loại cảm biến quang điện Photoelectric sensors?
Một cảm biến quang điện khép kín có chứa quang học, cùng với các thiết bị điện tử. Nó chỉ đòi hỏi một nguồn năng lượng. Bộ cảm biến thực hiện điều chế, giải điều chế, khuếch đại và chuyển đổi đầu ra của riêng nó. Một số cảm biến khép kín cung cấp các tùy chọn như bộ hẹn giờ hoặc bộ đếm điều khiển được tích hợp sẵn. Do tiến bộ công nghệ, các cảm biến quang điện khép kín ngày càng trở nên nhỏ hơn.
Cảm biến quang điện từ xa được sử dụng cho cảm biến từ xa chỉ chứa các thành phần quang học của cảm biến. Mạch điện cho đầu vào nguồn, khuếch đại và chuyển đổi đầu ra được đặt ở nơi khác, thường là trong bảng điều khiển. Điều này cho phép cảm biến, chính nó, là rất nhỏ. Ngoài ra, các điều khiển cho cảm biến dễ tiếp cận hơn, vì chúng có thể lớn hơn.
Khi không gian bị hạn chế hoặc môi trường quá thù địch ngay cả đối với các cảm biến từ xa, có thể sử dụng cáp quang. Sợi quang học là các thành phần cảm biến cơ học thụ động. Chúng có thể được sử dụng với cảm biến từ xa hoặc khép kín. Họ không có mạch điện và không có bộ phận chuyển động, và có thể an toàn hút ánh sáng vào và ra khỏi môi trường thù địch.
Chế độ cảm biến
Một sắp xếp chùm thông qua bao gồm một máy thu nằm trong đường ngắm của máy phát. Trong chế độ này, một đối tượng được phát hiện khi chùm ánh sáng bị chặn không cho nhận tín hiệu từ bộ phát.
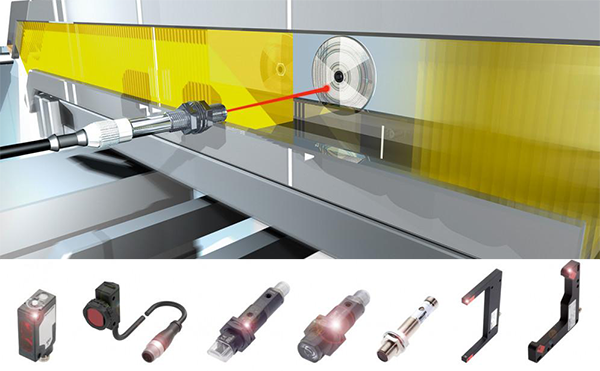
Một sắp xếp retroreflective đặt máy phát và máy thu tại cùng một vị trí và sử dụng một phản xạ để trả lại chùm ánh sáng ngược trở lại từ máy phát cho người nhận. Một đối tượng được cảm nhận khi chùm tia bị gián đoạn và không tiếp cận được với máy thu.
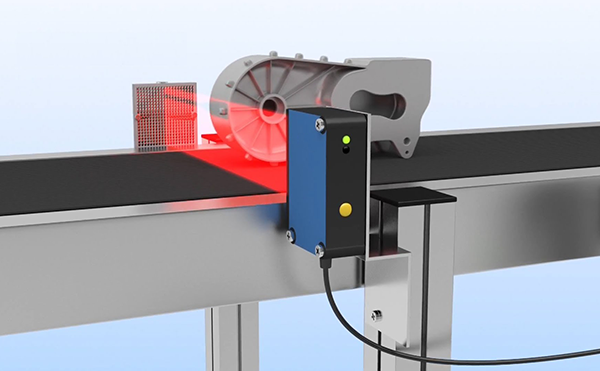
Một sắp xếp cảm biến (khuếch tán) là một trong đó bức xạ truyền phải phản xạ đối tượng để tiếp cận với máy thu. Trong chế độ này, một đối tượng được phát hiện khi người nhận thấy nguồn được truyền chứ không phải khi nó không nhìn thấy nó. Như trong các cảm biến phản xạ retro, các bộ phát và cảm biến khuếch tán khuếch tán được đặt trong cùng một vỏ bảo vệ. Nhưng mục tiêu hoạt động như một phản xạ, để phát hiện ánh sáng được phản xạ khỏi đối tượng nhiễu loạn. Emitter gửi ra một chùm ánh sáng (thường là một tia hồng ngoại xung, có thể nhìn thấy màu đỏ, hoặc laser) khuếch tán theo mọi hướng, lấp đầy một vùng phát hiện. Mục tiêu sau đó đi vào khu vực và làm lệch một phần của chùm tia trở lại máy thu. Phát hiện xảy ra và đầu ra được bật hoặc tắt khi đủ ánh sáng rơi vào máy thu.
Một số mắt ảnh có hai loại hoạt động khác nhau, ánh sáng hoạt động và hoạt động tối. Ánh sáng hoạt động mắt ảnh trở nên hoạt động khi người nhận "nhận" tín hiệu máy phát. Tối hoạt động mắt ảnh trở nên hoạt động khi người nhận "không nhận được" tín hiệu máy phát.
Phạm vi phát hiện của cảm biến quang điện là "trường xem" của nó, hoặc khoảng cách tối đa mà từ đó cảm biến có thể lấy thông tin, trừ đi khoảng cách tối thiểu. Một đối tượng phát hiện tối thiểu là đối tượng nhỏ nhất mà bộ cảm biến có thể phát hiện. Cảm biến chính xác hơn thường có thể có các đối tượng phát hiện tối thiểu kích thước nhỏ.
Sự khác biệt giữa các chế độ
| Name |
Ưu điểm |
Hạn chế |
| Through-Beam |
- Chính xác nhất
- Phạm vi cảm biến dài nhất
- Rất đáng tin cậy |
- Phải cài đặt ở hai điểm trên hệ thống: bộ phát và nhận
- Chi phí - phải mua cả người phát và người nhận |
| Reflective |
- Chỉ hơi kém chính xác hơn so với chùm tia
- Phạm vi cảm biến tốt hơn khuếch tán
- Rất đáng tin cậy |
- Phải lắp đặt ở hai điểm trên hệ thống: cảm biến và bộ phản xạ
- Hơi tốn kém hơn khuếch tán
- Phạm vi cảm biến nhỏ hơn chùm tia |
| Diffuse |
- Chỉ cài đặt tại một thời điểm
- Chi phí ít hơn so với chùm tia hoặc phản chiếu |
- Ít chính xác hơn so với chùm tia hoặc phản chiếu
- Thêm thời gian thiết lập liên quan |
English edition
Types
A self-contained photoelectric sensor contains the optics, along with the electronics. It requires only a power source. The sensor performs its own modulation, demodulation, amplification, and output switching. Some self-contained sensors provide such options as built-in control timers or counters. Because of technological progress, self-contained photoelectric sensors have become increasingly smaller.
Remote photoelectric sensors used for remote sensing contain only the optical components of a sensor. The circuitry for power input, amplification, and output switching are located elsewhere, typically in a control panel. This allows the sensor, itself, to be very small. Also, the controls for the sensor are more accessible, since they may be bigger.
When space is restricted or the environment too hostile even for remote sensors, fiber optics may be used. Fiber optics are passive mechanical sensing components. They may be used with either remote or self-contained sensors. They have no electrical circuitry and no moving parts, and can safely pipe light into and out of hostile environments.
Sensing modes
A through beam arrangement consists of a receiver located within the line-of-sight of the transmitter. In this mode, an object is detected when the light beam is blocked from getting to the receiver from the transmitter.
A retroreflective arrangement places the transmitter and receiver at the same location and uses a reflector to bounce the inverted light beam back from the transmitter to the receiver. An object is sensed when the beam is interrupted and fails to reach the receiver.
A proximity-sensing (diffused) arrangement is one in which the transmitted radiation must reflect off the object in order to reach the receiver. In this mode, an object is detected when the receiver sees the transmitted source rather than when it fails to see it. As in retro-reflective sensors, diffuse sensor emitters and receivers are located in the same housing. But the target acts as the reflector, so that detection of light is reflected off the disturbance object. The emitter sends out a beam of light (most often a pulsed infrared, visible red, or laser) that diffuses in all directions, filling a detection area. The target then enters the area and deflects part of the beam back to the receiver. Detection occurs and output is turned on or off when sufficient light falls on the receiver.
Some photo eyes have two different operational types, light operate and dark operate. Light operate photo eyes become operational when the receiver "receives" the transmitter signal. Dark operate photo eyes become operational when the receiver "does not receive" the transmitter signal.
The detecting range of a photoelectric sensor is its "field of view", or the maximum distance from which the sensor can retrieve information, minus the minimum distance. A minimum detectable object is the smallest object the sensor can detect. More accurate sensors can often have minimum detectable objects of minuscule size.
Difference Between Modes
| Name |
Advantages |
Disadvantages |
| Through-Beam |
- Most accurate
- Longest sensing range
- Very reliable
|
- Must install at two points on system: emitter and receiver
- Costly - must purchase both emitter and receiver
|
| Reflective |
- Only slightly less accurate than through-beam
- Sensing range better than diffuse
- Very reliable
|
- Must install at two points on system: sensor and reflector
- Slightly more costly than diffuse
- Sensing range less than through-beam
|
| Diffuse |
- Only install at one point
- Cost less than through-beam or reflective
|
- Less accurate than through- beam or reflective
- More setup time involved
|
(Nguyễn Thảo Trường - http://DienElectric.com theo Wikipedia)






























































































































 dienelectrics@gmail.com
dienelectrics@gmail.com 0909186879
0909186879