Wiki Về nguyên lý hoạt động của Khởi động mềm Soft starters
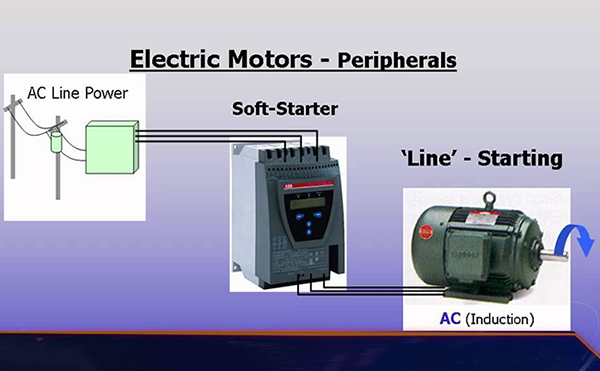
Khởi động mềm hoạt động trên một tiền đề khác nhau. Nguyên tắc này là bằng cách điều chỉnh điện áp được áp dụng cho động cơ trong khi khởi động, các đặc tính dòng điện và mô-men xoắn có thể bị hạn chế và kiểm soát.
Đối với động cơ cảm ứng, mô-men xoắn khởi đầu (LRT) xấp xỉ tỷ lệ với bình phương của dòng bắt đầu (LRA) được vẽ từ đường thẳng. LRT ∝ I2. Dòng khởi động này tỷ lệ với điện áp áp dụng (V). Vì vậy, mô-men xoắn cũng có thể được coi là tỷ lệ thuận với điện áp được áp dụng. LRT ∝ V2 .. Bằng cách điều chỉnh điện áp trong khi khởi động, dòng điện được rút ra bởi mô tơ và mô-men xoắn do động cơ sản xuất có thể được giảm thiểu và kiểm soát.
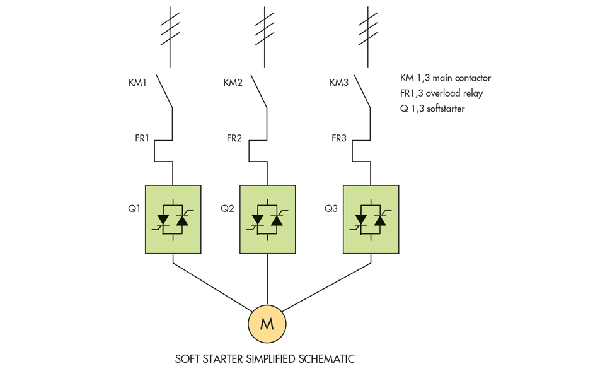
Bằng cách sử dụng sáu SCR trong cấu hình back to back như trong hình 2, khởi động mềm có thể điều chỉnh điện áp được áp dụng cho động cơ trong khi bắt đầu từ 0 volt đến điện áp dòng. Không giống như VFD, tần số dòng luôn được áp dụng cho động cơ. Chỉ những thay đổi điện áp.
Khởi động mềm hoạt động trên một tiền đề khác nhau. Nguyên tắc này là bằng cách điều chỉnh điện áp được áp dụng cho động cơ trong khi khởi động, các đặc tính dòng điện và mô-men xoắn có thể bị hạn chế và kiểm soát.
Đối với động cơ cảm ứng, mô-men xoắn khởi đầu (LRT) xấp xỉ tỷ lệ với bình phương của dòng bắt đầu (LRA) được vẽ từ đường thẳng. LRT ∝ I2. Dòng khởi động này tỷ lệ với điện áp áp dụng (V). Vì vậy, mô-men xoắn cũng có thể được coi là tỷ lệ thuận với điện áp được áp dụng. LRT ∝ V2 .. Bằng cách điều chỉnh điện áp trong khi khởi động, dòng điện được rút ra bởi mô tơ và mô-men xoắn do động cơ sản xuất có thể được giảm thiểu và kiểm soát.
Bằng cách sử dụng sáu SCR trong cấu hình back to back như trong hình 1, khởi động mềm có thể điều chỉnh điện áp được áp dụng cho động cơ trong khi bắt đầu từ 0 volt đến điện áp dòng. Không giống như VFD, tần số dòng luôn được áp dụng cho động cơ. Chỉ những thay đổi điện áp.
Hình 1: Six Back to back SCR Configuration
Phản hồi từ động cơ đến mạch logic điều khiển quá trình kích hoạt SCR được yêu cầu để ổn định gia tốc động cơ.
Nguyên lý hoạt động của drive điều khiển tốc độ biến thiên (Variable Speed Drive Operation)
Điện áp dòng AC, hình 2, được chỉnh lưu bằng cầu diode thụ động. Điều này có nghĩa là (các) diode thực hiện bất cứ khi nào điện áp dòng lớn hơn điện áp trên phần tụ điện. Các dạng sóng hiện tại kết quả có hai xung trong mỗi chu kỳ nửa, một cho mỗi cửa sổ dẫn diode.
Hình 2: Line Voltage
Dạng sóng, hình 3, cho thấy một số dòng điện xoay chiều khi quá trình truyền dẫn từ một diode này sang diode khác. Điều này là điển hình khi một trở kháng được sử dụng trong liên kết DC của drive và một số tải hiện hữu.
Hình 3 Line Voltage and Current
Toàn bộ chỉnh lưu Diode sóng sáu xung (Six-Pulse Full Wave Diode Rectifier)
Biến tần sử dụng điều chế độ rộng xung để tạo ra các dạng sóng đầu ra. Một dạng sóng tam giác được tạo ra ở tần số sóng mang mà IGBT của biến tần sẽ chuyển đổi.
Hình 4 Inverter Output Voltage Wave Form
Dạng sóng này được so sánh với dạng sóng sin ở tần số cơ bản sẽ được truyền đến động cơ. Kết quả là dạng sóng điện áp thể hiện trong hình 4.
Hình 5 cho thấy dạng sóng hiện tại kết quả tại động cơ với tín hiệu PWM được áp dụng.
Figure 5 Inverter Output Current Wave Form – Bi-Polar (top) and IGBT
Đầu ra biến tần có thể là bất kỳ tần số nào dưới hoặc cao hơn tần số dòng lên đến giới hạn của biến tần và / hoặc giới hạn cơ của động cơ. Lưu ý rằng biến tần luôn hoạt động trong vòng trượt của động cơ.
Nguyên lý hoạt động của một Khởi động mềm Soft starters
Thời gian của khi bật SCR là chìa khóa để kiểm soát đầu ra điện áp của bộ khởi động mềm. Trong trình tự bắt đầu, logic của khởi động mềm xác định khi nào bật SCR. Nó không bật SCR vào thời điểm điện áp chuyển từ âm sang dương, nhưng chờ một thời gian sau đó. Điều này được gọi là "quay trở lại" của SCR. Điểm mà SCR được bật được thiết lập hoặc được lập trình bởi những gì được gọi là mô-men xoắn ban đầu, cài đặt giới hạn hiện tại hoặc thiết lập giới hạn hiện tại.
Điện áp đầu vào cho bộ khởi động mềm giống như VFD được thể hiện trong hình 2. Kết quả của việc quay ngược trở lại SCR là điện áp giảm không hình sin tại các cực của động cơ được thể hiện trong hình 6. Vì động cơ là quy nạp và hiện tại bị trễ điện áp, SCR vẫn bật và tiến hành cho đến khi dòng điện đến 0. Đây là sau khi điện áp đã đi tiêu cực.
Đầu ra điện áp của SCR riêng lẻ
Hình 7 Dạng sóng điện áp khởi động mềm
Nếu so sánh với dạng sóng điện áp đầy đủ trong hình 2, có thể thấy rằng điện áp đỉnh là giống như sóng điện áp đầy đủ. Tuy nhiên dòng điện không tăng lên mức tương tự như khi điện áp đầy đủ được áp dụng do tính chất quy nạp của động cơ.
Khi điện áp này được áp dụng cho một động cơ, đầu ra hiện tại trông giống như hình 7. Khi tần số của điện áp là giống như tần số dòng tần số của dòng điện cũng giống nhau. Khi SCR được thiết kế để dẫn truyền đầy đủ, các khoảng trống hiện tại sẽ lấp đầy cho đến khi dạng sóng trông giống như việc áp dụng động cơ trực tiếp trên đường dây.
Đặc tính động cơ sử dụng khởi động mềm Soft Starters
Không giống như ổ đĩa AC, dòng điện và dòng động cơ cho một khởi động mềm luôn giống nhau. Trong khi bắt đầu, dòng điện thay đổi trực tiếp với cường độ của điện áp áp dụng. Mô-men xoắn động cơ thay đổi theo hình vuông của điện áp áp dụng hoặc dòng điện.
Yếu tố quan trọng nhất khi đánh giá khởi động mềm là mô-men xoắn động cơ. Động cơ tiêu chuẩn tạo ra khoảng 180% mômen tải đầy đủ khi khởi động. Do đó, giảm 25% điện áp hoặc dòng điện sẽ dẫn đến mô-men xoắn rotor bị khóa bằng mô-men xoắn tải đầy đủ (180% * (. 75) 2 = 101%). Nếu động cơ rút ra 600% dòng tải đầy đủ khi bắt đầu thì dòng điện trong ví dụ này sẽ giảm dòng khởi động 600% bình thường xuống còn 450% dòng tải đầy.
Bảng 1 dưới đây đưa ra nhiều ví dụ về ảnh hưởng của việc giảm điện áp hoặc dòng điện trên mô-men xoắn cánh quạt bị khóa của động cơ. Dữ liệu này là hợp lệ cho bắt đầu mềm và trở kháng loạt bắt đầu. Chúng không áp dụng cho các loại điện áp giảm khác bắt đầu như bộ chuyển đổi tự động và khởi động wye-delta.
Bảng 1 Rotor Torque khóa vs Rotor Amps khóa cho Soft Starters
% Mô-men xoắn dòng tải đầy đủ hoặc điện áp% đầy tải
% Current or Voltage
% Full Load Current %
Full Load Torque
100
600
180
90
540
146
80
480
115
75
450
101
70
420
88
60
360
65
50
300
45
40
240
29
Khi áp dụng các bộ khởi động mềm, cùng một hạn chế như các bộ khởi động giảm cơ điện được áp dụng. Hạn chế đó là “liệu động cơ có thể tạo ra mô-men xoắn đủ để có được tải bắt đầu với dòng khởi động mềm đang cho phép dòng chảy vào động cơ không?”
Khởi động mềm có một lợi thế hơn so với điện áp giảm thông thường bắt đầu. Họ có thể điều chỉnh điện áp, dòng điện và do đó mô-men xoắn trên một phạm vi rộng thay vì một hoặc một vài giá trị cố định. Điều này có thể được nhìn thấy trong Hình 10. Khi điện áp hoặc dòng điện được giữ ở một giá trị không đổi, đường cong mô-men xoắn tốc độ có nhãn “Giới hạn hiện tại” được tạo ra. Đường cong này sẽ di chuyển lên hoặc xuống tùy thuộc vào thiết lập giới hạn hiện tại. Đường biên trên của điều chỉnh này là đường cong “Full Voltage”.
Figure 10 Soft Start Speed Torque Curves
Những ứng dụng khác nhau của Khởi động mềm Soft starters
Với kiến thức về VFD và nguyên tắc khởi động mềm và hiệu suất động cơ với mỗi, sự khác biệt ứng dụng có thể được xem xét. Với danh sách các ứng dụng rất giống nhau, các tham số ứng dụng chung sẽ được trình bày cùng với một số ví dụ ứng dụng.
Tốc độ động cơ là một tham số trong đó VFD có lợi thế so với các bộ khởi động mềm. Thứ nhất, và rõ ràng nhất, là tốc độ của động cơ cần phải thay đổi từ 0 đến tần số dòng và đôi khi cao hơn tần số dòng.
Khởi động mềm áp dụng đường dây điện áp và tần số và do đó tốc độ hoạt động được cố định.
Ưu điểm liên quan đến tốc độ thứ hai là biến tần liên quan đến các quá trình đòi hỏi tốc độ không đổi. Nếu một tần số cố định được áp dụng cho một động cơ, tốc độ thực tế của động cơ đó không được điều chỉnh chính xác bởi tần số đầu vào. Tốc độ đầu ra thực sự được điều chỉnh bởi tải được áp dụng cho động cơ. Vì vậy, nếu một quá trình đòi hỏi phải điều chỉnh tốc độ rất chặt chẽ, tần số áp dụng cho động cơ phải được thay đổi liên quan đến tải được áp dụng.
Với việc sử dụng phản hồi cho VFD, điều này có thể được thực hiện. Một lần nữa khởi động mềm chỉ áp dụng tần số dòng nên không thể điều chỉnh tốc độ.
Trên các ứng dụng cần thời gian tăng tốc nhất quán, nên sử dụng biến tần. Điều này là do thực tế là thời gian tăng tốc cho khởi động mềm phụ thuộc nhiều vào tải hơn thời gian dốc đã chọn. Nếu thời gian tăng tốc không phải là một vấn đề và kiểm soát mô-men xoắn hoặc dòng điện là điều cần thiết, thì khởi động mềm là một ứng cử viên tốt cho ứng dụng. (Lưu ý: một số bộ khởi động mềm sử dụng phản hồi, chẳng hạn như máy đo tốc độ. Các đơn vị này có thể cung cấp khả năng tăng tốc theo thời gian với các tải trọng khác nhau. ).
Đối với việc dừng lại, một VFD sẽ mang động cơ đến nghỉ ngơi trong một thời gian nhất định. Điều này có thể được xây dựng thành một biến tần hoặc có thể yêu cầu một chức năng tùy chọn phanh động cho quán tính cao và đại tu tải trọng loại. Khởi động mềm với tính năng dừng mềm chỉ có thể kéo dài thời gian dừng. Và cũng giống như tăng tốc, thời gian dừng phụ thuộc vào tải. Nếu dừng thời gian và các đặc điểm dừng không quan trọng thì điểm dừng mềm có thể phù hợp với ứng dụng.
Một số bộ khởi động mềm được thiết kế đặc biệt cũng có thể cung cấp phanh. Chúng được thiết kế để giảm thời gian dừng khi bờ biển nghỉ ngơi rất dài. Nếu tải không phải là quán tính tinh khiết và có thể thay đổi thời gian dừng cũng sẽ thay đổi.
Trường hợp giới hạn dòng điện là lý do chính để không bắt đầu ở mức điện áp đầy đủ, phương pháp đầu tiên được xem xét hôm nay thường là các phần mềm khởi động mềm. Điều này là do sự khác biệt chi phí giữa một khởi động mềm và VFD tại các xếp hạng ampere rằng giới hạn hiện tại trở thành một yếu tố. Trong hầu hết các trường hợp khởi động mềm là một lựa chọn thích hợp.
Có những ứng dụng mà chi phí bổ sung của biến tần là thích hợp. Những trường hợp này là nơi mà động cơ không thể cung cấp đủ mô-men xoắn để bắt đầu tải với các giới hạn ampere áp đặt bởi hệ thống phân phối.
Bảng 1 cho thấy mô men xoắn động cơ được cung cấp ở các mức giới hạn dòng khởi động mềm khác nhau. Không giống như các bộ khởi động mềm, các ổ đĩa có thể tăng tốc động cơ đến tốc độ tối đa ở mô-men xoắn tải đầy đủ với dòng điện không vượt quá tải amps đầy đủ của động cơ. Hãy nhớ rằng sức mạnh vào VFD bằng với sức mạnh cộng với các tổn thất. Vì vậy, đối với những tải có yêu cầu mô-men xoắn cao hơn so với khởi động mềm có thể cung cấp với các giới hạn áp đặt bởi hệ thống phân phối, một biến tần có thể là giải pháp cần thiết.
Nếu mô-men xoắn bắt đầu là một mối quan tâm khi lựa chọn một ổ đĩa hoặc khởi động, hãy nhớ sự khác biệt quyết liệt trong số lượng mô-men xoắn có thể được phát triển cho một lượng dòng nhất định. Các ổ đĩa có một mô-men xoắn cao hơn nhiều cho mỗi tỷ lệ amp.
(Nguyễn Thảo Trường - http://DienElectric.ComtheoElectricalsolution)






























































































































 dienelectrics@gmail.com
dienelectrics@gmail.com 0909186879
0909186879 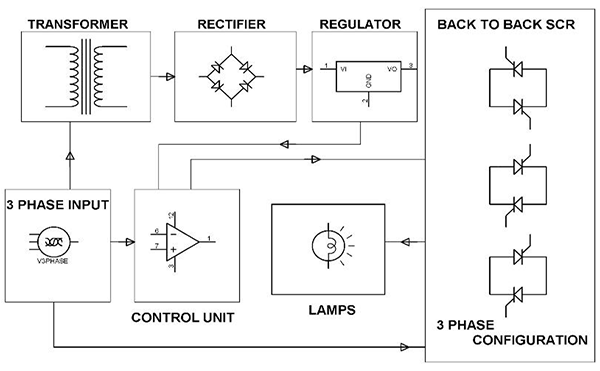






.png "Inverter Output Voltage Wave Form")
-and-IGBT.png "Inverter Output Current Wave Form – Bi-Polar (top) and IGBT")