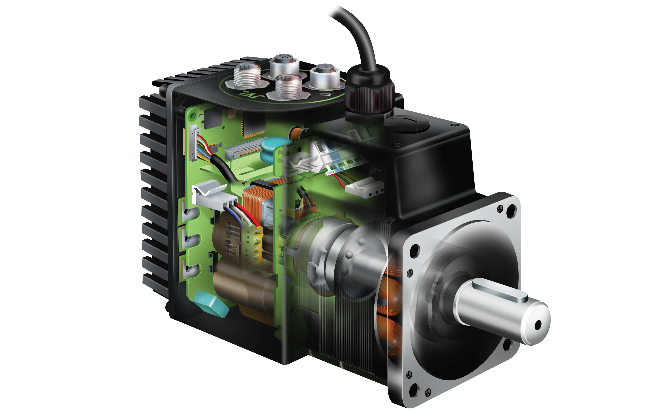
Động cơ servo (hay động cơ servo hoặc đơn giản là servo) là bộ truyền động quay hoặc tuyến tính cho phép điều khiển chính xác vị trí góc hoặc tuyến tính, vận tốc và gia tốc trong hệ thống cơ học. Nó là một phần của cơ cấu servo và bao gồm một động cơ phù hợp được ghép nối với cảm biến để phản hồi vị trí và bộ điều khiển (thường là mô-đun chuyên dụng được thiết kế riêng cho động cơ servo).
Động cơ servo không phải là một loại động cơ cụ thể, mặc dù thuật ngữ động cơ servo thường được dùng để chỉ động cơ phù hợp để sử dụng trong hệ thống điều khiển vòng kín. Động cơ servo được sử dụng trong các ứng dụng như rô bốt, máy móc CNC và sản xuất tự động.
Cơ chế
Động cơ servo là cơ cấu servo vòng kín sử dụng phản hồi vị trí (vị trí tuyến tính hoặc quay) để điều khiển chuyển động và vị trí cuối cùng của nó. Đầu vào để điều khiển là tín hiệu (tương tự hoặc kỹ thuật số) biểu thị vị trí mong muốn của trục đầu ra.
Động cơ được ghép nối với một số loại bộ mã hóa vị trí để cung cấp phản hồi vị trí (và có khả năng cũng cung cấp phản hồi tốc độ trong các thiết kế phức tạp hơn). Bộ điều khiển so sánh vị trí đo được với vị trí mong muốn để tạo ra tín hiệu lỗi, khi được phản hồi lại sẽ khiến động cơ quay theo hướng cần thiết để đưa trục đến vị trí mong muốn. Tín hiệu lỗi giảm xuống bằng không khi tiếp cận vị trí mong muốn, dừng động cơ.
Động cơ servo đơn giản sử dụng cảm biến vị trí chỉ thông qua một biến trở và điều khiển bang-bang của động cơ; động cơ chỉ quay ở tốc độ tối đa hoặc dừng lại. Loại động cơ servo này không được sử dụng rộng rãi trong điều khiển chuyển động công nghiệp, nhưng nó tạo thành cơ sở cho các servo đơn giản và rẻ tiền được sử dụng cho các mô hình điều khiển bằng sóng vô tuyến.
Động cơ servo tinh vi hơn sử dụng bộ mã hóa tuyệt đối (một loại bộ mã hóa quay) để tính toán vị trí của trục và suy ra tốc độ của trục đầu ra. Bộ truyền động tốc độ thay đổi được sử dụng để điều khiển tốc độ động cơ.[5] Cả hai cải tiến này, thường kết hợp với thuật toán điều khiển PID, cho phép đưa động cơ servo đến vị trí được chỉ huy nhanh hơn và chính xác hơn, với ít hiện tượng vượt quá hơn.
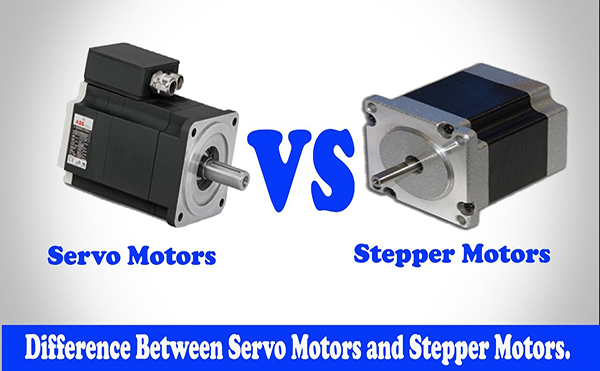
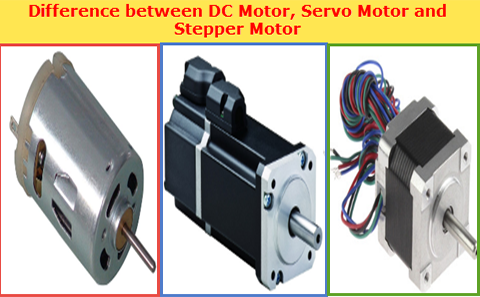
Động cơ servo so với động cơ bước
Động cơ servo thường được sử dụng như một giải pháp thay thế hiệu suất cao cho động cơ bước. Động cơ bước có một số khả năng vốn có để điều khiển vị trí, vì chúng có các bước đầu ra tích hợp. Điều này thường cho phép chúng được sử dụng như một bộ điều khiển vị trí vòng hở, không có bất kỳ bộ mã hóa phản hồi nào, vì tín hiệu truyền động của chúng chỉ định số bước chuyển động cần quay, nhưng để làm được điều này, bộ điều khiển cần 'biết' vị trí của động cơ bước khi bật nguồn. Do đó, khi bật nguồn lần đầu, bộ điều khiển sẽ phải kích hoạt động cơ bước và xoay nó đến một vị trí đã biết, ví dụ cho đến khi nó kích hoạt công tắc giới hạn cuối. Điều này có thể được quan sát thấy khi bật máy in phun; bộ điều khiển sẽ di chuyển bộ phận chứa tia mực sang cực trái và cực phải để thiết lập các vị trí cuối. Động cơ servo có thể ngay lập tức quay theo bất kỳ góc nào mà bộ điều khiển chỉ thị, bất kể vị trí ban đầu khi bật nguồn là gì nếu sử dụng bộ mã hóa tuyệt đối.
Việc thiếu phản hồi của động cơ bước hạn chế hiệu suất của nó, vì động cơ bước chỉ có thể điều khiển tải nằm trong khả năng của nó, nếu không, các bước bị bỏ lỡ khi tải có thể dẫn đến lỗi định vị và hệ thống có thể phải khởi động lại hoặc hiệu chuẩn lại. Bộ mã hóa và bộ điều khiển của động cơ servo là một chi phí bổ sung, nhưng chúng tối ưu hóa hiệu suất của toàn bộ hệ thống (cho tất cả tốc độ, công suất và độ chính xác) so với công suất của động cơ cơ bản. Với các hệ thống lớn hơn, khi động cơ mạnh chiếm tỷ lệ ngày càng tăng trong chi phí hệ thống, động cơ servo có lợi thế.
Động cơ bước vòng kín ngày càng phổ biến trong những năm gần đây. Chúng hoạt động giống như động cơ servo nhưng có một số điểm khác biệt trong điều khiển phần mềm để có chuyển động mượt mà. Lợi ích chính của động cơ bước vòng kín là chi phí tương đối thấp. Ngoài ra, không cần phải điều chỉnh bộ điều khiển PID trên hệ thống bước vòng kín.
Bộ mã hóa
Các động cơ servo đầu tiên được phát triển với bộ đồng bộ làm bộ mã hóa của chúng.[9] Nhiều công việc đã được thực hiện với các hệ thống này trong quá trình phát triển radar và pháo phòng không trong Thế chiến II.
Các động cơ servo đơn giản có thể sử dụng các biến trở làm bộ mã hóa vị trí của chúng. Chúng chỉ được sử dụng ở mức đơn giản nhất và rẻ nhất và cạnh tranh chặt chẽ với động cơ bước. Chúng bị mài mòn và nhiễu điện trong đường ray biến trở. Mặc dù có thể phân biệt tín hiệu vị trí của chúng bằng điện để có được tín hiệu tốc độ, nhưng bộ điều khiển PID có thể sử dụng tín hiệu tốc độ như vậy thường đảm bảo một bộ mã hóa chính xác hơn.
Các động cơ servo hiện đại sử dụng bộ mã hóa quay, tuyệt đối hoặc gia tăng. Bộ mã hóa tuyệt đối có thể xác định vị trí của chúng khi bật nguồn nhưng phức tạp và đắt hơn. Bộ mã hóa gia tăng đơn giản hơn, rẻ hơn và hoạt động ở tốc độ nhanh hơn. Các hệ thống gia tăng, như động cơ bước, thường kết hợp khả năng vốn có của chúng để đo các khoảng quay với một cảm biến vị trí bằng không đơn giản để thiết lập vị trí của chúng khi khởi động.
Thay vì động cơ servo, đôi khi người ta sử dụng động cơ có bộ mã hóa tuyến tính riêng biệt bên ngoài. Các hệ thống động cơ + bộ mã hóa tuyến tính này tránh được sự không chính xác trong hệ thống truyền động giữa động cơ và giá đỡ tuyến tính, nhưng thiết kế của chúng phức tạp hơn vì chúng không còn là hệ thống đóng gói sẵn tại nhà máy nữa.
Động cơ
Loại động cơ không quan trọng đối với động cơ servo và có thể sử dụng nhiều loại khác nhau. Đơn giản nhất, người ta sử dụng động cơ DC nam châm vĩnh cửu chổi than vì chúng đơn giản và giá thành thấp. Động cơ servo công nghiệp nhỏ thường là động cơ không chổi than được chuyển mạch điện tử. Đối với động cơ servo công nghiệp lớn, người ta thường sử dụng động cơ cảm ứng AC, thường có bộ truyền động tần số thay đổi để có thể kiểm soát tốc độ của chúng. Để có hiệu suất tối ưu trong một gói nhỏ gọn, người ta sử dụng động cơ AC không chổi than có từ trường nam châm vĩnh cửu, về cơ bản là phiên bản lớn của động cơ điện DC không chổi than.
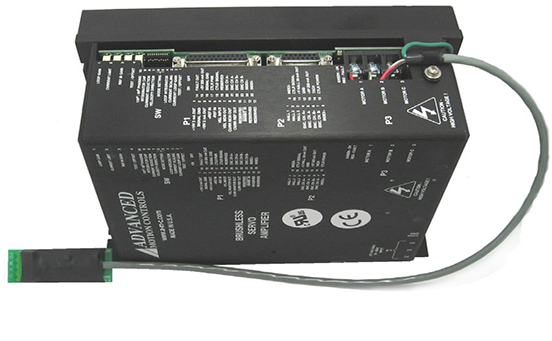
Mô-đun truyền động cho động cơ servo là một thành phần công nghiệp tiêu chuẩn. Thiết kế của chúng là một nhánh của điện tử công suất, thường dựa trên cầu H MOSFET ba pha hoặc IGBT. Các mô-đun tiêu chuẩn này chấp nhận một hướng và số xung (khoảng cách quay) làm đầu vào. Chúng cũng có thể bao gồm các tính năng giám sát quá nhiệt, mô-men xoắn quá mức và phát hiện tình trạng chết máy. Vì loại bộ mã hóa, tỷ số truyền động và động lực học tổng thể của hệ thống là cụ thể cho từng ứng dụng nên việc sản xuất bộ điều khiển tổng thể dưới dạng mô-đun có sẵn khó khăn hơn, do đó, chúng thường được triển khai như một phần của bộ điều khiển chính.
Điều khiển
Hầu hết các động cơ servo hiện đại đều được thiết kế và cung cấp xung quanh một mô-đun bộ điều khiển chuyên dụng từ cùng một nhà sản xuất. Bộ điều khiển cũng có thể được phát triển xung quanh các bộ vi điều khiển để giảm chi phí cho các ứng dụng khối lượng lớn.
Động cơ servo tích hợp
Động cơ servo tích hợp được thiết kế để bao gồm động cơ, bộ điều khiển, bộ mã hóa và các thiết bị điện tử liên quan vào một gói duy nhất.
Động cơ servo hay động cơ bước?
Điểm khác biệt giữa động cơ servo và động cơ bước là gì? Mặc dù cả hai loại động cơ đều có thể điều khiển tốc độ và vị trí, nhưng chúng đều được thiết kế cho các ứng dụng rất khác nhau. Động cơ bước có các bước tích hợp cho phép bộ điều khiển báo hiệu số bước cần thực hiện, tuy nhiên, điều này chỉ hoạt động nếu bộ điều khiển biết vị trí của trục đầu ra. Do đó, khi động cơ bước được cấp nguồn, bộ điều khiển sẽ di chuyển trục đầu ra đến vị trí đã biết hoặc cho đến khi kích hoạt công tắc giới hạn cuối. Động cơ servo sử dụng cảm biến để biết vị trí của trục đầu ra để khi được cấp nguồn, động cơ có thể ngay lập tức di chuyển đến vị trí mong muốn.
Thiết kế của động cơ bước hạn chế hiệu suất của nó do các cảm biến phản hồi hạn chế. Nếu hệ thống bị quá tải, động cơ bước có thể bỏ qua các bước gây ra lỗi vị trí và phải hiệu chuẩn lại hệ thống chuyển động. Với động cơ servo, bộ mã hóa và bộ điều khiển theo dõi vị trí của trục đầu ra để có thể sửa bất kỳ lỗi nào.
Một điểm khác biệt nữa giữa servo và động cơ bước là tốc độ tối đa và mô-men xoắn ở các tốc độ. Động cơ bước cung cấp mô-men xoắn lớn nhất khi nó không di chuyển, được gọi là mô-men xoắn giữ. Khi tốc độ của trục đầu ra tăng lên, mô-men xoắn giảm mạnh. Động cơ servo có tốc độ tối đa cao hơn nhiều so với động cơ bước và sẽ có thể cung cấp nhiều mô-men xoắn hơn ở tốc độ cao.
Ưu điểm của Động cơ Servo
Động cơ servo có một số ưu điểm so với các loại động cơ khác, bao gồm
Kiểm soát chính xác
Động cơ servo cung cấp khả năng kiểm soát chính xác vị trí, tốc độ và mô-men xoắn, khiến chúng trở nên lý tưởng cho các ứng dụng đòi hỏi độ chính xác và khả năng lặp lại.
Mô-men xoắn cao
Động cơ servo được thiết kế để cung cấp mô-men xoắn cao ở mọi tốc độ, điều này khiến chúng phù hợp với các ứng dụng yêu cầu mô-men xoắn khởi động cao và di chuyển tải ở tốc độ cao.
Thời gian phản hồi nhanh
Động cơ servo có thời gian phản hồi rất nhanh, điều này khiến chúng trở nên lý tưởng cho các ứng dụng yêu cầu tăng tốc nhanh.
Phạm vi tốc độ rộng
Động cơ servo có khả năng hoạt động ở nhiều tốc độ, từ rất chậm đến rất nhanh, mà không làm mất đi độ chính xác hoặc độ chuẩn xác.
Ứng dụng của động cơ servo
Động cơ servo được sử dụng trong nhiều ứng dụng công nghiệp và thương mại đòi hỏi phải kiểm soát chuyển động chính xác, bao gồm:
Robot
Động cơ servo thường được sử dụng trong robot để kiểm soát chính xác chuyển động của khớp, cũng như cho kẹp và bộ phận tác động cuối.
Máy CNC
Động cơ servo được sử dụng rộng rãi trong các máy điều khiển số bằng máy tính (CNC) để định vị chính xác và kiểm soát chuyển động của các dụng cụ cắt.
Máy đóng gói
Động cơ servo được sử dụng trong máy đóng gói để kiểm soát chuyển động của băng tải, cũng như để định vị và di chuyển chính xác các vật liệu đóng gói.
Hàng không vũ trụ
Động cơ servo được sử dụng trong các ứng dụng hàng không vũ trụ để kiểm soát chính xác các thành phần máy bay, chẳng hạn như cánh tà và bánh đáp.
Xe tự hành
Động cơ servo được sử dụng để cung cấp năng lượng và lái bánh xe trong xe tự hành.
Thiết bị y tế
Động cơ servo được sử dụng trong thiết bị y tế để kiểm soát chính xác các thiết bị y tế, chẳng hạn như robot phẫu thuật, chân tay giả và các thiết bị y tế khác.
In ấn và xử lý giấy
Động cơ servo được sử dụng trong thiết bị in ấn và xử lý giấy để kiểm soát chính xác quá trình nạp giấy, cắt và gấp giấy.
Tự động hóa công nghiệp
Động cơ servo được sử dụng trong nhiều ứng dụng tự động hóa công nghiệp, bao gồm hệ thống băng tải, xử lý vật liệu và dây chuyền lắp ráp.
Loại Động cơ servo | Servo motors gì và của hãng nào phù hợp với nhu cầu sử dụng của bạn
Khi đang cần tìm mua chính xác loại Động cơ servo | Servo motors phù hợp với nhu cầu đang cần, https://DienElectric.Com phân phối bán, với cách phân loại theo hãng: Siemens, ABB, AB, Eaton, B&R, Phoenix Contact, Schneider, Mitsubishi Electric, LS, ...; theo mục đích sử dụng; cung cấp đầy đủ, chi tiết, chính xác thông tin, cũng như những tư vấn chính xác, tận tình, và ngay lập tức sẽ cho bạn kết quả như ý muốn. Vì sự hài lòng của khách hàng chính là thành công của chúng tôi.
Động cơ servo | Servo motors đang được phân phối tại ANH TY Co., LTD | https://DienElectric.com
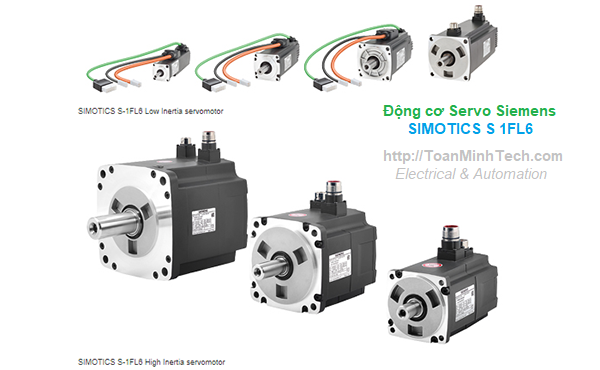
Động cơ servo SIMOTICS S-1FL6-1FL6 Điện áp hoạt động 3AC 400 V Pn = 5 kW; Nn = 2000 vòng/phút M0 = 30 Nm; MN = 23,9 Nm Chiều cao..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ servo SIMOTICS S-1FL6 Điện áp hoạt động 230 V 3AC Pn = 0,05 kW; Nn = 3000 vòng / phút M0 = 0,16 Nm; MN = 0,16 Nm Chiều..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ servo đồng bộ SIMOTICS S 1FK7 Nhỏ gọn, 18 Nm 100K, 3000 vòng/phút, 3,77 kW làm mát tự nhiên Đầu nối..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ servo đồng bộ SIMOTICS S 1FK7 Compact, 18 Nm 100K, 2000 vòng/phút, 3,05 kW làm mát tự nhiên IM B5 (IM V1,..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ servo đồng bộ 1FK7, 18Nm 100K, 3000 vòng/phút, 3,77kW, làm mát tự nhiên, IM B5 (IM V1, IM V3), phích..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ servo SIMOTICS S Synchronous servo motor 1FK7 Compact, 27Nm 100K, 2000rpm, 4.29kW Naturally cooled IM B5 (IM V1, IM V3) power/signal..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ servo đồng bộ SIMOTICS S 1FK7 COMPACT 16Nm, 100K 3000rpm, 3.30kW. Các đầu nối nguồn / tín hiệu IM B5 (IM V1, IM V3) được..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ servo đồng bộ thuộc dòng 1FT6. 2.5Nm, 100K, 6000rpm Naturally cooled IM B5 (IM V1, IM V3) for power and signal connector Connector..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
TTL, Brake, Điện áp hoạt động 3AC 400V PN = 1.5kW; NN = 2000rpm M0 = 8Nm; MN = 7.16Nm Chiều cao trục 65 mm với đầu nối góc; Bộ..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Điện áp hoạt động 3AC 400V PN = 1.5kW; NN = 2000rpm M0 = 8Nm; MN = 7.16Nm Chiều cao trục 65 mm, Bộ mã hóa tuyệt đối 20 bit (biến..Giá lẻ: Call Giá tốt nhất xem...0909186879Email

 dienelectrics@gmail.com
dienelectrics@gmail.com 0909186879
0909186879  GermanyCó Discount
GermanyCó Discount 2,407
2,407 Germanycó discount
Germanycó discount Germanycó discuont
Germanycó discuont GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount Germanycó discount
Germanycó discount Germanycó discount
Germanycó discount JapanCó Discount
JapanCó Discount JapanCó Discount
JapanCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount