An absolute encoder maintains position information when power is removed from the encoder. The position of the encoder is available immediately on applying power. The relationship between the encoder value and the physical position of the controlled machinery is set at assembly; the system does not need to return to a calibration point to maintain position accuracy.
An absolute encoder has multiple code rings with various binary weightings which provide a data word representing the absolute position of the encoder within one revolution. This type of encoder is often referred to as a parallel absolute encoder.
A multi-turn absolute rotary encoder includes additional code wheels and toothed wheels. A high-resolution wheel measures the fractional rotation, and lower-resolution geared code wheels record the number of whole revolutions of the shaft.
Absolute rotary encoder
Construction
Digital absolute encoders produce a unique digital code for each distinct angle of the shaft. They come in two basic types: optical and mechanical.
Mechanical absolute encoders
A metal disc containing a set of concentric rings of openings is fixed to an insulating disc, which is rigidly fixed to the shaft. A row of sliding contacts is fixed to a stationary object so that each contact wipes against the metal disc at a different distance from the shaft. As the disc rotates with the shaft, some of the contacts touch metal, while others fall in the gaps where the metal has been cut out. The metal sheet is connected to a source of electric current, and each contact is connected to a separate electrical sensor. The metal pattern is designed so that each possible position of the axle creates a unique binary code in which some of the contacts are connected to the current source (i.e. switched on) and others are not (i.e. switched off).
Because brush-type contacts are susceptible to wear, encoders using contacts are not common; they can be found in low-speed applications such as manual volume or tuning controls in a radio receiver.
Optical absolute encoders
The optical encoder's disc is made of glass or plastic with transparent and opaque areas. A light source and photo detector array reads the optical pattern that results from the disc's position at any one time.[8] The Gray code is often used. This code can be read by a controlling device, such as a microprocessor or microcontroller to determine the angle of the shaft.
The absolute analog type produces a unique dual analog code that can be translated into an absolute angle of the shaft.
Magnetic absolute encoders
The magnetic encoder uses a series of magnetic poles (2 or more) to represent the encoder position to a magnetic sensor (typically magneto-resistive or Hall Effect). The magnetic sensor reads the magnetic pole positions.
This code can be read by a controlling device, such as a microprocessor or microcontroller to determine the angle of the shaft, similar to an optical encoder.
The absolute analog type produces a unique dual analog code that can be translated into an absolute angle of the shaft.
Due to the nature of recording magnetic effects, these encoders may be optimal to use in conditions where other types of encoders may fail due to dust or debris accumulation. Magnetic encoders are also relatively insensitive to vibrations, minor misalignment, or shocks.
Brushless motor commutation
Built-in rotary encoders are used to indicate the angle of the motor shaft in permanent magnet brushless motors, which are commonly used on CNC machines, robots, and other industrial equipment. In such cases, the encoder serves as a feedback device that plays a vital role in proper equipment operation. Brushless motors require electronic commutation, which often is implemented in part by using rotor magnets as a low-resolution absolute encoder (typically six or twelve pulses per revolution). The resulting shaft angle information is conveyed to the servo drive to enable it to energize the proper stator winding at any moment in time.
Capacitive absolute encoders
An asymmetrical shaped disc is rotated within the encoder. This disc will change the capacitance between two electrodes which can be measured and calculated back to an angular value.
Absolute multi-turn encoder
A multi-turn encoder can detect and store more than one revolution. The term absolute multi-turn encoder is generally used if the encoder will detect movements of its shaft even if the encoder is not provided with external power.
Battery-powered multi-turn encoder
This type of encoder uses a battery for retaining the counts across power cycles. It uses energy conserving electrical design to detect the movements.
Geared multi-turn encoder
These encoders use a train of gears to mechanically store the number of revolutions. The position of the single gears is detected with one of the above-mentioned technologies.
Self-powered multi-turn encoder
These encoders use the principle of energy harvesting to generate energy from the moving shaft. This principle, introduced in 2007, uses a Wiegand sensor to produce electricity sufficient to power the encoder and write the turns count to non-volatile memory.
Ways of encoding shaft position
Standard binary encoding
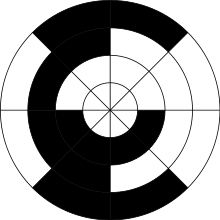
Rotary encoder for angle-measuring devices marked in 3-bit binary. The inner ring corresponds to Contact 1 in the table. Black sectors are "on". Zero degrees is on the right-hand side, with angle increasing counterclockwise.
An example of a binary code, in an extremely simplified encoder with only three contacts, is shown below.
An example of a binary code, in an extremely simplified encoder with only three contacts, is shown below.
Standard Binary Encoding
Sector
Contact 1
Contact 2
Contact 3
Angle
0
off
off
off
0° to 45°
1
off
off
ON
45° to 90°
2
off
ON
off
90° to 135°
3
off
ON
ON
135° to 180°
4
ON
off
off
180° to 225°
5
ON
off
ON
225° to 270°
6
ON
ON
off
270° to 315°
7
ON
ON
ON
315° to 360°
In general, where there are n contacts, the number of distinct positions of the shaft is 2n. In this example, n is 3, so there are 2³ or 8 positions.
In the above example, the contacts produce a standard binary count as the disc rotates. However, this has the drawback that if the disc stops between two adjacent sectors, or the contacts are not perfectly aligned, it can be impossible to determine the angle of the shaft. To illustrate this problem, consider what happens when the shaft angle changes from 179.9° to 180.1° (from sector 3 to sector 4). At some instant, according to the above table, the contact pattern changes from off-on-on to on-off-off. However, this is not what happens in reality. In a practical device, the contacts are never perfectly aligned, so each switches at a different moment. If contact 1 switches first, followed by contact 3 and then contact 2, for example, the actual sequence of codes is:
off-on-on (starting position)
on-on-on (first, contact 1 switches on)
on-on-off (next, contact 3 switches off)
on-off-off (finally, contact 2 switches off)
Now look at the sectors corresponding to these codes in the table. In order, they are 3, 7, 6 and then 4. So, from the sequence of codes produced, the shaft appears to have jumped from sector 3 to sector 7, then gone backwards to sector 6, then backwards again to sector 4, which is where we expected to find it. In many situations, this behaviour is undesirable and could cause the system to fail. For example, if the encoder were used in a robot arm, the controller would think that the arm was in the wrong position, and try to correct the error by turning it through 180°, perhaps causing damage to the arm.
Gray encoding
Rotary encoder for angle-measuring devices marked in 3-bit binary-reflected Gray code (BRGC). The inner ring corresponds to Contact 1 in the table. Black sectors are "on". Zero degrees is on the right-hand side, with angle increasing counter-clockwise.
To avoid the above problem, Gray coding is used. This is a system of binary counting in which any two adjacent codes differ by only one bit position. For the three-contact example given above, the Gray-coded version would be as follows.
Gray Coding
Sector
Contact 1
Contact 2
Contact 3
Angle
0
off
off
off
0° to 45°
1
off
off
ON
45° to 90°
2
off
ON
ON
90° to 135°
3
off
ON
off
135° to 180°
4
ON
ON
off
180° to 225°
5
ON
ON
ON
225° to 270°
6
ON
off
ON
270° to 315°
7
ON
off
off
315° to 360°
In this example, the transition from sector 3 to sector 4, like all other transitions, involves only one of the contacts changing its state from on to off or vice versa. This means that the sequence of incorrect codes shown in the previous illustration cannot happen.
Single-track Gray encoding
If the designer moves a contact to a different angular position (but at the same distance from the center shaft), then the corresponding "ring pattern" needs to be rotated the same angle to give the same output. If the most significant bit (the inner ring in Figure 1) is rotated enough, it exactly matches the next ring out. Since both rings are then identical, the inner ring can be omitted, and the sensor for that ring moved to the remaining, identical ring (but offset at that angle from the other sensor on that ring). Those two sensors on a single ring make a quadrature encoder with a single ring.
It is possible to arrange several sensors around a single track (ring) so that consecutive positions differ at only a single sensor; the result is the single-track Gray code encoder.
Data output methods
Depending on the device and manufacturer, an absolute encoder may use any of several signal types and communication protocols to transmit data, including parallel binary, analog signals (current or voltage), and serial bus systems such as SSI, BiSS, Heidenhain EnDat, Sick-Stegmann Hiperface, DeviceNet, Modbus, Profibus, CANopen and EtherCAT, which typically employ Ethernet or RS-422/RS-485 physical layers.
(DienElectric.com lược dịch theoWikipedia)
##Tag: Absolute Encoders Sick, Absolute Encoders Sick, Absolute Encoders Sick, optical Absolute Encoders Sick, Absolute Encoders Pepperl Fuchs, Absolute Encoders Pepperl Fuchs, Absolute Encoders Pepperl Fuchs, optical Absolute Encoders Pepperl Fuchs, Absolute Encoders Turck, Absolute Encoders Turck, Absolute Encoders Turck, optical Absolute Encoders Turck, Absolute Encoders Omron, Absolute Encoders Omron, Absolute Encoders Omron, optical Absolute Encoders Omron, Absolute Encoders AB, Absolute Encoders AB, optical Absolute Encoders AB, Bộ mã hóa vòng quay tuyệt đối Sick, Bộ mã hóa vòng quay tuyệt đối Sick, Bộ mã hóa vòng quay tuyệt đối Sick, optical Bộ mã hóa vòng quay tuyệt đối Sick, Bộ mã hóa vòng quay tuyệt đối Pepperl Fuchs, Bộ mã hóa vòng quay tuyệt đối Pepperl Fuchs, Bộ mã hóa vòng quay tuyệt đối Pepperl Fuchs, optical Bộ mã hóa vòng quay tuyệt đối Pepperl Fuchs, Bộ mã hóa vòng quay tuyệt đối Turck, Bộ mã hóa vòng quay tuyệt đối Turck, Bộ mã hóa vòng quay tuyệt đối Turck, optical Bộ mã hóa vòng quay tuyệt đối Turck, Bộ mã hóa vòng quay tuyệt đối Omron, Bộ mã hóa vòng quay tuyệt đối Omron, Bộ mã hóa vòng quay tuyệt đối Omron, optical Bộ mã hóa vòng quay tuyệt đối Omron, Bộ mã hóa vòng quay tuyệt đối AB, Bộ mã hóa vòng quay tuyệt đối AB, Bộ mã hóa vòng quay tuyệt đối AB, optical Bộ mã hóa vòng quay tuyệt đối AB, Bộ mã hóa vòng quay tuyệt đối Siemens, Bộ mã hóa vòng quay tuyệt đối Omron, Bộ mã hóa vòng quay tuyệt đối Sick, Bộ mã hóa vòng quay tuyệt đối pepperl+fuchs, Bộ mã hóa vòng quay tuyệt đối Balluff, Bộ mã hóa vòng quay tuyệt đối Banner, Bộ mã hóa vòng quay tuyệt đối IFM, ...
Bộ mã hóa tuyệt đối đa vòng (Multiturn absolute encoder), ST22 MT12 bit với DRIVE-CLiQ; mặt bích kẹp; trục 10 mm..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Bộ mã hóa vòng quay tuyệt đối, lập lại, 36bit, Drive-CLIQ, Trục khuyết 12mm
- Điện áp hoạt động Lên DC 24 V +- 20%..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Bộ mã hóa vòng quay tuyệt đối đa lượt Multiturn absolute 10-30VDC, 4W, 14BIT Multiturn, 100MBIT/S Transfer rate, 2000Hz,..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Bộ mã hóa vòng quay tuyệt đối, một lượt 13 bit với SSI, điện áp hoạt động 10-30V. Trục cuốn đồng bộ 6mm. Ổ cắm mặt..Giá lẻ: Call Giá tốt nhất xem...0909186879Email

 dienelectrics@gmail.com
dienelectrics@gmail.com 0909186879
0909186879 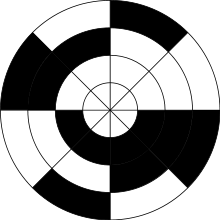
 GermanyCó Discount
GermanyCó Discount 1,271
1,271 GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount JapanCó Discount
JapanCó Discount