Động cơ điện đồng bộ là động cơ xoay chiều, ở trạng thái ổn định, chuyển động quay của trục được đồng bộ với tần số của dòng điện cung cấp; chu kỳ quay chính xác bằng một số tích phân của chu kỳ xoay chiều. Động cơ đồng bộ chứa nam châm điện xoay chiều nhiều pha trên stato của động cơ tạo ra từ trường quay theo thời gian với dao động của dòng điện. Rôto với nam châm vĩnh cửu hoặc nam châm điện quay cùng bước với trường stato với cùng tốc độ và kết quả là tạo ra trường nam châm quay đồng bộ thứ hai của bất kỳ động cơ xoay chiều nào. Động cơ đồng bộ được gọi là cấp nguồn kép nếu nó được cung cấp các nam châm điện xoay chiều nhiều pha được kích thích độc lập trên cả rôto và stato./ A synchronous electric motor is an AC motor in which, at steady state, the rotation of the shaft is synchronized with the frequency of the supply current; the rotation period is exactly equal to an integral number of AC cycles. Synchronous motors contain multiphase AC electromagnets on the stator of the motor that create a magnetic field which rotates in time with the oscillations of the line current. The rotor with permanent magnets or electromagnets turns in step with the stator field at the same rate and as a result, provides the second synchronized rotating magnet field of any AC motor. A synchronous motor is termed doubly fed if it is supplied with independently excited multiphase AC electromagnets on both the rotor and stator.
Động cơ đồng bộ và động cơ cảm ứng là những loại động cơ xoay chiều được sử dụng rộng rãi nhất. Sự khác biệt giữa hai loại là động cơ đồng bộ quay với tốc độ bị khóa với tần số dòng vì nó không dựa vào cảm ứng dòng điện để tạo ra từ trường của rôto. Ngược lại, động cơ cảm ứng yêu cầu trượt: rôto phải quay chậm hơn một chút so với xoay chiều xoay chiều để tạo ra dòng điện trong cuộn dây rôto. Động cơ đồng bộ nhỏ được sử dụng trong các ứng dụng thời gian như trong đồng hồ đồng bộ, bộ đếm thời gian trong thiết bị, máy ghi âm và các cơ cấu bảo dưỡng chính xác trong đó động cơ phải hoạt động ở tốc độ chính xác; Tốc độ chính xác là tần số của đường dây điện, được kiểm soát cẩn thận trong hệ thống lưới điện lớn được kết nối với nhau./ The synchronous motor and induction motor are the most widely used types of AC motor. The difference between the two types is that the synchronous motor rotates at a rate locked to the line frequency since it does not rely on current induction to produce the rotor's magnetic field. By contrast, the induction motor requires slip: the rotor must rotate slightly slower than the AC alternations in order to induce current in the rotor winding. Small synchronous motors are used in timing applications such as in synchronous clocks, timers in appliances, tape recorders and precision servomechanisms in which the motor must operate at a precise speed; speed accuracy is that of the power line frequency, which is carefully controlled in large interconnected grid systems.
Động cơ đồng bộ có sẵn ở các kích thước mã lực phân đoạn nhỏ tự kích thích đến các kích thước công nghiệp công suất cao. Trong dải mã lực phân đoạn, hầu hết các động cơ đồng bộ được sử dụng khi yêu cầu tốc độ không đổi chính xác. Những máy này thường được sử dụng trong đồng hồ điện tương tự, bộ đếm thời gian và các thiết bị khác khi yêu cầu thời gian chính xác. Trong các quy mô công nghiệp công suất cao hơn, động cơ đồng bộ cung cấp hai chức năng quan trọng. Đầu tiên, nó là một phương tiện hiệu quả cao để chuyển đổi năng lượng AC để làm việc. Thứ hai, nó có thể hoạt động ở hệ số công suất dẫn đầu hoặc thống nhất và do đó cung cấp hiệu chỉnh hệ số công suất./ Synchronous motors are available in self-excited sub-fractional horsepower sizes to high power industrial sizes. In the fractional horsepower range, most synchronous motors are used where precise constant speed is required. These machines are commonly used in analog electric clocks, timers and other devices where correct time is required. In higher power industrial sizes, the synchronous motor provides two important functions. First, it is a highly efficient means of converting AC energy to work. Second, it can operate at leading or unity power factor and thereby provide power-factor correction.
Các loại động cơ đồng bộ/ Type
Động cơ đồng bộ thuộc loại máy điện đồng bộ tổng quát hơn, bao gồm cả máy phát điện đồng bộ. Hoạt động của máy phát điện sẽ được quan sát nếu các cực trường được "dẫn động về phía trước của thông lượng khe hở không khí do chuyển động tịnh tiến của động cơ chính". Hoạt động của động cơ sẽ được quan sát nếu các cực trường bị "kéo về phía sau thông lượng khe hở không khí do mômen hãm của tải trục"./ Synchronous motors fall under the more general category of synchronous machines which also includes the synchronous generator. Generator action will be observed if the field poles are "driven ahead of the resultant air-gap flux by the forward motion of the prime mover". Motor action will be observed if the field poles are "dragged behind the resultant air-gap flux by the retarding torque of a shaft load".
Có hai loại động cơ đồng bộ chính phụ thuộc vào cách từ hóa của rôto: không kích thích và kích từ một chiều./ There are two major types of synchronous motors depending on how the rotor is magnetized: non-excited and direct-current excited.
Động cơ không kích thích/ Non-excited motors
Động cơ đồng bộ một pha 60 Hz 1800 vòng / phút dùng cho máy Teletype, kiểu rôto không kích từ, sản xuất từ năm 1930 đến năm 1955./ Single-phase 60 Hz 1800 RPM synchronous motor for Teletype machine, non-excited rotor type, manufactured from 1930 to 1955.
Trong động cơ không kích thích, rôto được làm bằng thép. Ở tốc độ đồng bộ, nó quay cùng bước với từ trường quay của stato, vì vậy nó có một từ trường gần như không đổi xuyên qua nó. Từ trường ngoài stato từ hóa rôto, tạo ra các cực từ cần thiết để quay rôto. Rôto được làm bằng thép có độ bền cao như thép coban. Chúng được sản xuất theo thiết kế nam châm vĩnh cửu, điện trở và từ trễ:/ In non-excited motors, the rotor is made of steel. At synchronous speed it rotates in step with the rotating magnetic field of the stator, so it has an almost-constant magnetic field through it. The external stator field magnetizes the rotor, inducing the magnetic poles needed to turn it. The rotor is made of a high-retentivity steel such as cobalt steel. These are manufactured in permanent magnet, reluctance and hysteresis designs:
Động cơ điện trở/ Reluctance motors
Chúng có một rôto bao gồm một thép đúc đặc với các cực răng nhô ra (nổi bật). Thông thường, có ít rôto hơn các cực của stato để giảm thiểu gợn mômen và ngăn các cực căn chỉnh đồng thời — một vị trí không thể tạo ra mômen. Kích thước của khe hở không khí trong mạch từ và do đó từ trở là nhỏ nhất khi các cực thẳng hàng với từ trường (quay) của stato, và tăng theo góc giữa chúng. Điều này tạo ra một mômen kéo rôto thẳng hàng với cực gần nhất của trường stato. Do đó ở tốc độ đồng bộ, rôto bị "khóa" vào trường quay của stato. Điều này không thể khởi động động cơ, vì vậy các cực rôto thường có các cuộn dây lồng sóc được nhúng vào chúng, để cung cấp mô-men xoắn dưới tốc độ đồng bộ. Máy khởi động như một động cơ cảm ứng cho đến khi nó đạt đến tốc độ đồng bộ, khi rôto "kéo vào" và khóa vào trường quay của stato./ These have a rotor consisting of a solid steel casting with projecting (salient) toothed poles. Typically there are fewer rotor than stator poles to minimize torque ripple and to prevent the poles from all aligning simultaneously—a position that cannot generate torque. The size of the air gap in the magnetic circuit and thus the reluctance is minimum when the poles are aligned with the (rotating) magnetic field of the stator, and increases with the angle between them. This creates a torque pulling the rotor into alignment with the nearest pole of the stator field. Thus at synchronous speed the rotor is "locked" to the rotating stator field. This cannot start the motor, so the rotor poles usually have squirrel-cage windings embedded in them, to provide torque below synchronous speed. The machine starts as an induction motor until it approaches synchronous speed, when the rotor "pulls in" and locks to the rotating stator field.
Các thiết kế động cơ điện trở có xếp hạng từ mã lực phân đoạn (một vài watt) đến khoảng 22 kW. Động cơ từ trở rất nhỏ có mô-men xoắn thấp và thường được sử dụng cho các ứng dụng thiết bị đo đạc. Mô-men xoắn vừa phải, động cơ nhiều mã lực sử dụng cấu tạo lồng sóc với rôto có răng. Khi được sử dụng với nguồn điện có tần số điều chỉnh, tất cả các động cơ trong hệ thống truyền động có thể được điều khiển ở cùng một tốc độ. Tần số cung cấp điện quyết định tốc độ hoạt động của động cơ./ Reluctance motor designs have ratings that range from fractional horsepower (a few watts) to about 22 kW. Very small reluctance motors have low torque, and are generally used for instrumentation applications. Moderate torque, multi-horsepower motors use squirrel cage construction with toothed rotors. When used with an adjustable frequency power supply, all motors in the drive system can be controlled at exactly the same speed. The power supply frequency determines motor operating speed.
Động cơ trễ/ Hysteresis motors
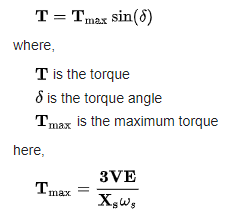
Chúng có một rôto hình trụ trơn, rắn chắc, được đúc bằng thép coban "cứng" có từ tính cao. [5] Vật liệu này có vòng từ trễ rộng (lực kháng từ cao), có nghĩa là một khi nó được từ hóa theo một hướng nhất định, nó cần một từ trường ngược lớn để đảo ngược từ hóa. Trường stato quay làm cho mỗi khối lượng nhỏ của rôto phải chịu một từ trường đảo chiều. Vì độ trễ pha của từ hóa trễ hơn pha của trường đặt vào. Kết quả của việc này là trục của từ trường gây ra trong rôto trễ hơn trục của trường stato một góc δ không đổi, tạo ra mômen xoắn khi rôto cố gắng "bắt kịp" với từ trường stato. Miễn là rôto còn dưới tốc độ đồng bộ, mỗi hạt của rôto chịu một từ trường đảo chiều ở tần số "trượt" khiến nó quay quanh vòng trễ của nó, làm cho trường rôto bị trễ và tạo ra mô-men xoắn. Trong rôto có kết cấu thanh điện trở thấp 2 cực. Khi rôto đạt đến tốc độ đồng bộ và độ trượt về không, điều này sẽ từ hóa và căn chỉnh với trường stato, khiến rôto "khóa" với trường quay stato./ These have a solid smooth cylindrical rotor, cast of a high coercivity magnetically "hard" cobalt steel.[5] This material has a wide hysteresis loop (high coercivity), meaning once it is magnetized in a given direction, it requires a large reverse magnetic field to reverse the magnetization. The rotating stator field causes each small volume of the rotor to experience a reversing magnetic field. Because of hysteresis the phase of the magnetization lags behind the phase of the applied field. The result of this is that the axis of the magnetic field induced in the rotor lags behind the axis of the stator field by a constant angle δ, producing a torque as the rotor tries to "catch up" with the stator field. As long as the rotor is below synchronous speed, each particle of the rotor experiences a reversing magnetic field at the "slip" frequency which drives it around its hysteresis loop, causing the rotor field to lag and create torque. There is a 2-pole low reluctance bar structure in the rotor. As the rotor approaches synchronous speed and slip goes to zero, this magnetizes and aligns with the stator field, causing the rotor to "lock" to the rotating stator field.
Một ưu điểm chính của động cơ trễ là do góc trễ δ không phụ thuộc vào tốc độ, nên nó phát triển mô-men xoắn không đổi từ tốc độ khởi động đến tốc độ đồng bộ. Do đó, nó có thể tự khởi động và không cần cuộn dây cảm ứng để khởi động nó, mặc dù nhiều thiết kế có cấu trúc cuộn dây dẫn lồng sóc được nhúng vào rôto để cung cấp thêm mô-men xoắn khi khởi động./ A major advantage of the hysteresis motor is that since the lag angle δ is independent of speed, it develops constant torque from startup to synchronous speed. Therefore, it is self-starting and doesn't need an induction winding to start it, although many designs do have a squirrel-cage conductive winding structure embedded in the rotor to provide extra torque at start-up.
Động cơ trễ được sản xuất theo xếp hạng mã lực dưới phân số, chủ yếu là động cơ servo và động cơ thời gian. Đắt hơn loại bất đắc dĩ, động cơ trễ được sử dụng khi yêu cầu tốc độ không đổi chính xác./ Hysteresis motors are manufactured in sub-fractional horsepower ratings, primarily as servomotors and timing motors. More expensive than the reluctance type, hysteresis motors are used where precise constant speed is required.
Động cơ nam châm vĩnh cửu/ Permanent-magnet motors
Động cơ đồng bộ nam châm vĩnh cửu (PMSM) sử dụng nam châm vĩnh cửu nhúng vào rôto thép để tạo ra từ trường không đổi. Stato mang các cuộn dây được nối với nguồn điện xoay chiều để tạo ra từ trường quay (như trong động cơ không đồng bộ). Ở tốc độ đồng bộ, các cực của rôto khóa với từ trường quay. Động cơ đồng bộ nam châm vĩnh cửu tương tự như động cơ điện một chiều không chổi than. Nam châm neodymium là loại nam châm được sử dụng phổ biến nhất trong các động cơ này./ A permanent-magnet synchronous motor (PMSM) uses permanent magnets embedded in the steel rotor to create a constant magnetic field. The stator carries windings connected to an AC supply to produce a rotating magnetic field (as in an asynchronous motor). At synchronous speed the rotor poles lock to the rotating magnetic field. Permanent magnet synchronous motors are similar to brushless DC motors. Neodymium magnets are the most commonly used magnets in these motors.
Động cơ nam châm vĩnh cửu đã được sử dụng làm động cơ thang máy không hộp số từ năm 2000./ Permanent magnet motors have been used as gearless elevator motors since 2000.
Hầu hết các PMSM đều yêu cầu một bộ truyền động tần số thay đổi để khởi động. Tuy nhiên, một số kết hợp lồng sóc trong rôto để khởi động - chúng được gọi là PMSM tự khởi động hoặc tự khởi động. Chúng thường được sử dụng làm chất thay thế hiệu suất cao hơn cho động cơ cảm ứng (do không có hiện tượng trượt), nhưng cần được chỉ định cẩn thận cho ứng dụng để đảm bảo đạt được tốc độ đồng bộ và hệ thống có thể chịu được mômen xoắn trong quá trình khởi động./ Most PMSMs require a variable-frequency drive to start. However, some incorporate a squirrel cage in the rotor for starting — these are known as line-start or self-starting PMSMs. These are typically used as higher-efficiency replacements for induction motors (owing to the lack of slip), but need to be specified carefully for the application to ensure that synchronous speed is reached and that the system can withstand the torque ripple during starting.
Động cơ đồng bộ nam châm vĩnh cửu chủ yếu được điều khiển bằng cách sử dụng điều khiển mômen xoắn trực tiếp [14] và điều khiển hướng trường. Tuy nhiên, các phương pháp này phải chịu các gợn sóng từ thông stato và momen xoắn tương đối cao. Bộ điều khiển mạng thần kinh và điều khiển tiên đoán được phát triển gần đây để đối phó với những vấn đề này./ Permanent magnet synchronous motors are mainly controlled using direct torque control[14] and field oriented control. However, these methods suffer from relatively high torque and stator flux ripples. Predictive control and neural network controllers are recently developed to cope with these isssues.
Động cơ kích từ DC/ DC-excited motors
Thường được chế tạo với kích thước lớn hơn (lớn hơn khoảng 1 mã lực hoặc 1 kilowatt) những động cơ này yêu cầu dòng điện một chiều (DC) cung cấp cho rôto để kích thích. Điều này được cung cấp dễ dàng nhất thông qua các vòng trượt, nhưng cũng có thể sử dụng cách bố trí bộ chỉnh lưu và cảm ứng xoay chiều không chổi than. [18] Dòng điện một chiều có thể được cung cấp từ nguồn một chiều riêng biệt hoặc từ máy phát điện một chiều nối trực tiếp với trục động cơ./ Usually made in larger sizes (larger than about 1 horsepower or 1 kilowatt) these motors require direct current (DC) supplied to the rotor for excitation. This is most straightforwardly supplied through slip rings, but a brushless AC induction and rectifier arrangement may also be used.[18] The direct current may be supplied from a separate DC source or from a DC generator directly connected to the motor shaft.
Kỹ thuật điều khiển/ Control techniques
Động cơ đồng bộ nam châm vĩnh cửu và động cơ điện từ yêu cầu phải có hệ thống điều khiển để vận hành (VFD hoặc truyền động servo)./ A permanent magnet synchronous motor and reluctance motor requires a control system for operating (VFD or servo drive).
Có một số lượng lớn các phương pháp điều khiển PMSM, được lựa chọn tùy thuộc vào cấu tạo của động cơ điện và phạm vi./ There are a large number of control methods for PMSM, which is selected depending on the construction of the electric motor and the scope.
Các phương pháp điều khiển có thể được chia thành/ Control methods can be divided into:
- Hình sin/ Sinusoidal
- Vô hướng/ Scalar
- Véc tơ/ Vector (FOC, DTC)
- Hình thang/ Trapezoidal
- Vòng lặp mở/ Open loop
- Vòng lập đóng/ Closed loop (with and without Hall sensor)
Tốc độ đồng bộ/ Synchronous speed
The synchronous speed of a synchronous motor is given:
in RPM, by:
and in rad·s−1, by:
where: f: là tần số của dòng điện xoay chiều tính bằng Hz,/ is the frequency of the AC supply current in Hz, p: là số cực từ./ is the number of magnetic poles. P: là số cặp cực (hiếm khi, mặt phẳng giao hoán), {displaystyle P = p / 2}./ is the number of pole pairs (rarely, planes of commutation), {displaystyle P=p/2}.
Ví dụ/ Examples
Động cơ đồng bộ một pha, 4 cực (2 cực cặp) đang hoạt động ở tần số nguồn cung cấp xoay chiều là 50 Hz. Số cặp cực là 2 nên tốc độ đồng bộ là/ A single-phase, 4-pole (2-pole-pair) synchronous motor is operating at an AC supply frequency of 50 Hz. The number of pole-pairs is 2, so the synchronous speed is:
Một động cơ đồng bộ ba pha, 12 cực (6 cực cặp) đang hoạt động ở tần số nguồn cung cấp xoay chiều là 60 Hz. Số cặp cực là 6 nên tốc độ đồng bộ là/ A three-phase, 12-pole (6-pole-pair) synchronous motor is operating at an AC supply frequency of 60 Hz. The number of pole-pairs is 6, so the synchronous speed is:
Số cực từ, p, bằng số nhóm cuộn dây trên mỗi pha. Để xác định số nhóm cuộn dây trên mỗi pha trong động cơ 3 pha, hãy đếm số cuộn dây, chia cho số pha, được 3. Các cuộn dây có thể trải qua một số khe trong lõi stato, khiến việc đếm chúng trở nên tẻ nhạt. . Đối với động cơ 3 pha, nếu đếm tổng số 12 nhóm cuộn dây thì nó có 4 cực từ. Đối với máy 3 pha 12 cực sẽ có 36 cuộn dây. Số cực từ trong rôto bằng số cực từ trong stato./ The number of magnetic poles, p, is equal to the number of coil groups per phase. To determine the number of coil groups per phase in a 3-phase motor, count the number of coils, divide by the number of phases, which is 3. The coils may span several slots in the stator core, making it tedious to count them. For a 3-phase motor, if you count a total of 12 coil groups, it has 4 magnetic poles. For a 12-pole 3-phase machine, there will be 36 coils. The number of magnetic poles in the rotor is equal to the number of magnetic poles in the stator.
Cấu tạo/ Construction
Các thành phần chính của động cơ đồng bộ là stato và rôto. Stato của động cơ đồng bộ và stato của động cơ cảm ứng có cấu tạo tương tự nhau. Với máy điện cấp đôi đồng bộ rôto quấn là ngoại lệ, khung stato chứa tấm bọc. Các đường gân và bàn phím hình tròn được gắn vào tấm bọc. Để chịu được trọng lượng của máy, cần có các giá đỡ khung và chân máy. Khi cuộn dây trường được kích thích bằng kích từ một chiều, cần có chổi than và vòng trượt để nối với nguồn kích từ. Cuộn dây trường cũng có thể được kích thích bằng máy kích thích không chổi than. Các rôto hình trụ, tròn, (còn được gọi là rôto không cực) được sử dụng cho tối đa sáu cực. Trong một số máy hoặc khi cần số lượng cực lớn, người ta sử dụng rôto cực nổi. Cấu tạo của động cơ đồng bộ tương tự như cấu tạo của máy phát điện xoay chiều đồng bộ. Hầu hết cấu tạo động cơ đồng bộ sử dụng phần ứng đứng yên và cuộn dây trường quay. Loại cấu tạo này là một lợi thế hơn loại động cơ một chiều, trong đó phần ứng được sử dụng là loại quay./ The principal components of a synchronous motor are the stator and the rotor. The stator of synchronous motor and stator of induction motor are similar in construction. With the wound-rotor synchronous doubly fed electric machine as the exception, the stator frame contains wrapper plate.[23] Circumferential ribs and keybars are attached to the wrapper plate. To carry the weight of the machine, frame mounts and footings are required. When the field winding is excited by DC excitation, brushes and slip rings are required to connect to the excitation supply. The field winding can also be excited by a brushless exciter. Cylindrical, round rotors, (also known as non salient pole rotor) are used for up to six poles. In some machines or when a large number of poles are needed, a salient pole rotor is used. The construction of synchronous motor is similar to that of a synchronous alternator. Most of the synchronous motors construction uses the stationary armature and rotating field winding. This type of construction as an advantage than dc motor type where the armature used is of rotating type.
Hoạt động/ Operation
Hoạt động của động cơ đồng bộ là do sự tương tác của từ trường của stato và rôto. Cuộn dây stato của nó, bao gồm cuộn dây 3 pha, được cung cấp nguồn điện 3 pha và rôto được cung cấp nguồn điện một chiều. Cuộn dây 3 pha stato mang dòng điện 3 pha tạo ra từ thông quay 3 pha (và do đó là từ trường quay). Rôto khóa với từ trường quay và quay cùng với nó. Khi trường rôto khóa với từ trường quay, động cơ được cho là đồng bộ hóa. Có thể sử dụng cuộn dây stato một pha (hoặc hai pha xuất phát từ một pha), nhưng trong trường hợp này hướng quay không được xác định và máy điện có thể khởi động theo một trong hai hướng trừ khi bố trí khởi động ngăn cản việc này./ The operation of a synchronous motor is due to the interaction of the magnetic fields of the stator and the rotor. Its stator winding, which consists of a 3 phase winding, is provided with a 3 phase supply, and the rotor is provided with a DC supply. The 3 phase stator winding carrying 3 phase currents produces 3 phase rotating magnetic flux (and therefore a rotating magnetic field). The rotor locks in with the rotating magnetic field and rotates along with it. Once the rotor field locks in with the rotating magnetic field, the motor is said to be in synchronization. A single-phase (or two-phase derived from single phase) stator winding is possible, but in this case the direction of rotation is not defined and the machine may start in either direction unless prevented from doing so by the starting arrangements.
Khi động cơ đang hoạt động, tốc độ của động cơ chỉ phụ thuộc vào tần số cung cấp. Khi tăng tải động cơ vượt quá tải đánh thủng, động cơ mất đồng bộ và cuộn dây không còn theo từ trường quay. Vì động cơ không thể tạo ra mô-men xoắn (đồng bộ) nếu nó không đồng bộ, động cơ đồng bộ thực tế có cuộn dây điều tiết lồng sóc (amortisseur) một phần hoặc hoàn toàn để ổn định hoạt động và tạo điều kiện khởi động. Bởi vì cuộn dây này nhỏ hơn cuộn dây của động cơ cảm ứng tương đương và có thể quá nóng khi hoạt động lâu và do điện áp tần số trượt lớn được tạo ra trong cuộn dây kích từ rôto, các thiết bị bảo vệ động cơ đồng bộ cảm nhận được tình trạng này và ngắt nguồn cung cấp (lệch bước sự bảo vệ)./ Once the motor is in operation, the speed of the motor is dependent only on the supply frequency. When the motor load is increased beyond the breakdown load, the motor falls out of synchronization and the field winding no longer follows the rotating magnetic field. Since the motor cannot produce (synchronous) torque if it falls out of synchronization, practical synchronous motors have a partial or complete squirrel-cage damper (amortisseur) winding to stabilize operation and facilitate starting. Because this winding is smaller than that of an equivalent induction motor and can overheat on long operation, and because large slip-frequency voltages are induced in the rotor excitation winding, synchronous motor protection devices sense this condition and interrupt the power supply (out of step protection).
Các phương pháp khởi động/ Starting methods
Trên một kích thước nhất định, động cơ đồng bộ không phải là động cơ tự khởi động. Tính chất này là do quán tính của rôto; nó không thể ngay lập tức theo sự quay của từ trường của stato. Vì động cơ đồng bộ không tạo ra mô-men xoắn trung bình vốn có khi dừng, nên nó không thể tăng tốc đến tốc độ đồng bộ mà không có một số cơ cấu bổ sung./ Above a certain size, synchronous motors are not self-starting motors. This property is due to the inertia of the rotor; it cannot instantly follow the rotation of the magnetic field of the stator. Since a synchronous motor produces no inherent average torque at standstill, it cannot accelerate to synchronous speed without some supplemental mechanism.
Động cơ lớn hoạt động trên tần số công suất thương mại bao gồm một cuộn dây cảm ứng lồng sóc cung cấp đủ mô-men xoắn để tăng tốc và cũng có tác dụng làm giảm dao động trong tốc độ động cơ đang hoạt động. Khi rôto gần đạt đến tốc độ đồng bộ, cuộn dây trường được kích thích và động cơ kéo vào đồng bộ hóa. Hệ thống động cơ rất lớn có thể bao gồm một động cơ "ngựa con" giúp tăng tốc máy điện đồng bộ không tải trước khi có tải. Động cơ được điều khiển bằng điện tử có thể được tăng tốc từ tốc độ 0 bằng cách thay đổi tần số của dòng điện stato./ Large motors operating on commercial power frequency include a squirrel-cage induction winding which provides sufficient torque for acceleration and which also serves to damp oscillations in motor speed in operation. Once the rotor nears the synchronous speed, the field winding is excited, and the motor pulls into synchronization. Very large motor systems may include a "pony" motor that accelerates the unloaded synchronous machine before load is applied. Motors that are electronically controlled can be accelerated from zero speed by changing the frequency of the stator current.
Động cơ đồng bộ rất nhỏ thường được sử dụng trong đồng hồ cơ điện chạy đường dây hoặc đồng hồ đo thời gian sử dụng tần số dòng điện để chạy cơ cấu bánh răng ở tốc độ chính xác. Các động cơ đồng bộ nhỏ như vậy có thể khởi động mà không cần sự trợ giúp nếu mômen quán tính của rôto và tải cơ của nó đủ nhỏ [vì động cơ] sẽ được tăng tốc từ tốc độ trượt lên đến tốc độ đồng bộ trong nửa chu kỳ tăng tốc của mômen cản. "Động cơ đồng bộ một pha như trong đồng hồ điện treo tường có thể quay tự do theo một trong hai hướng không giống như loại cực có bóng mờ. Xem Động cơ đồng bộ cực có bóng mờ để biết hướng khởi động nhất quán như thế nào./ Very small synchronous motors are commonly used in line-powered electric mechanical clocks or timers that use the power line frequency to run the gear mechanism at the correct speed. Such small synchronous motors are able to start without assistance if the moment of inertia of the rotor and its mechanical load is sufficiently small [because the motor] will be accelerated from slip speed up to synchronous speed during an accelerating half cycle of the reluctance torque." Single-phase synchronous motors such as in electric wall clocks can freely rotate in either direction unlike a shaded-pole type. See Shaded-pole synchronous motor for how consistent starting direction is obtained.
Kinh tế vận hành là một tham số quan trọng để đề cập đến các phương pháp khởi động động cơ khác nhau. Do đó, kích từ của rôto là một cách khả thi để giải quyết vấn đề khởi động động cơ. Ngoài ra, các phương pháp khởi động hiện đại được đề xuất cho máy điện đồng bộ lớn bao gồm đảo cực lặp lại của các cực rôto trong quá trình khởi động./ The operational economics is an important parameter to address different motor starting methods. Accordingly, the excitation of the rotor is a possible way to solve the motor starting issue. In addition, modern proposed starting methods for large synchronous machines include repetitive polarity inversion of the rotor poles during startup.
Ứng dụng, tính chất đặc biệt và ưu điểm/ Applications, special properties, and advantages
Sử dụng làm tụ điện đồng bộ/ Use as synchronous condenser
Đường cong chữ V của máy điện đồng bộ/ V-curve of a synchronous machine
Bằng cách thay đổi kích thích của động cơ đồng bộ, nó có thể được thực hiện để hoạt động ở hệ số công suất trễ, dẫn đầu và thống nhất. Kích thích tại đó hệ số công suất là thống nhất được gọi là điện áp kích thích bình thường. [36] Cường độ dòng điện ở mức kích thích này là nhỏ nhất. [36] Điện áp kích thích lớn hơn điện áp kích thích bình thường được gọi là quá điện áp kích thích, điện áp kích thích nhỏ hơn mức kích thích bình thường được gọi là dưới kích thích. [36] Khi động cơ bị kích thích quá mức, emf trở lại sẽ lớn hơn điện áp đầu cuối của động cơ. Điều này gây ra hiệu ứng khử từ do phản ứng phần ứng./ By varying the excitation of a synchronous motor, it can be made to operate at lagging, leading and unity power factor. Excitation at which the power factor is unity is termed normal excitation voltage.[36] The magnitude of current at this excitation is minimum.[36] Excitation voltage more than normal excitation is called over excitation voltage, excitation voltage less than normal excitation is called under excitation.[36] When the motor is over excited, the back emf will be greater than the motor terminal voltage. This causes a demagnetizing effect due to armature reaction.
Đường cong V của máy điện đồng bộ cho thấy dòng điện phần ứng là một hàm của dòng điện trường. Khi tăng dòng điện trường phần ứng lúc đầu giảm, sau đó đạt cực tiểu, sau đó tăng lên. Điểm tối thiểu cũng là điểm mà tại đó hệ số công suất là sự thống nhất./ The V curve of a synchronous machine shows armature current as a function of field current. With increasing field current armature current at first decreases, then reaches a minimum, then increases. The minimum point is also the point at which power factor is unity.
Khả năng điều khiển có chọn lọc hệ số công suất này có thể được sử dụng để hiệu chỉnh hệ số công suất của hệ thống công suất mà động cơ được kết nối với. Vì hầu hết các hệ thống điện có quy mô đáng kể đều có hệ số công suất trễ thực, sự hiện diện của các động cơ đồng bộ được khai thác quá mức sẽ di chuyển hệ số công suất thực của hệ thống đến gần sự thống nhất, nâng cao hiệu suất. Hiệu chỉnh hệ số công suất như vậy thường là một tác dụng phụ của động cơ đã có trong hệ thống để cung cấp công cơ học, mặc dù động cơ có thể chạy mà không có tải cơ học chỉ đơn giản là để hiệu chỉnh hệ số công suất. Trong các nhà máy công nghiệp lớn như nhà máy, sự tương tác giữa các động cơ đồng bộ và các động cơ khác, độ trễ, tải có thể là một yếu tố cần xem xét rõ ràng trong thiết kế điện của nhà máy./ This ability to selectively control power factor can be exploited for power factor correction of the power system to which the motor is connected. Since most power systems of any significant size have a net lagging power factor, the presence of overexcited synchronous motors moves the system's net power factor closer to unity, improving efficiency. Such power-factor correction is usually a side effect of motors already present in the system to provide mechanical work, although motors can be run without mechanical load simply to provide power-factor correction. In large industrial plants such as factories the interaction between synchronous motors and other, lagging, loads may be an explicit consideration in the plant's electrical design.
Steady state stability limit
Khi có tải, góc mômen {displaystyle delta} tăng lên. Khi {displaystyle delta} = 90 °, mô-men xoắn sẽ là cực đại. Nếu tải được đặt thêm thì động cơ sẽ mất tính đồng bộ, vì mômen động cơ sẽ nhỏ hơn mômen tải. Mômen tải lớn nhất có thể tác dụng lên động cơ mà không làm mất tính đồng bộ của nó được gọi là giới hạn ổn định trạng thái ổn định của động cơ đồng bộ./ When load is applied, torque angle {displaystyle delta } increases. When {displaystyle delta } = 90° the torque will be maximum. If load is applied further then the motor will lose its synchronism, since motor torque will be less than load torque. The maximum load torque that can be applied to a motor without losing its synchronism is called steady state stability limit of a synchronous motor.
Những vấn đề khác/ Other
Động cơ đồng bộ đặc biệt hữu ích trong các ứng dụng yêu cầu điều khiển tốc độ và / hoặc vị trí chính xác./ Synchronous motors are especially useful in applications requiring precise speed and/or position control.
- Tốc độ không phụ thuộc vào tải trên phạm vi hoạt động của động cơ./ Speed is independent of the load over the operating range of the motor.
- Tốc độ và vị trí có thể được kiểm soát chính xác bằng cách sử dụng các điều khiển vòng hở; ví dụ: động cơ bước./ Speed and position may be accurately controlled using open loop controls; e.g., stepper motors.
- Các ứng dụng công suất thấp bao gồm máy định vị, nơi yêu cầu độ chính xác cao và thiết bị truyền động rô bốt./ Low-power applications include positioning machines, where high precision is required, and robot actuators.
- Chúng sẽ giữ nguyên vị trí của chúng khi cho dòng điện một chiều vào cả cuộn dây stato và rôto./ They will hold their position when a DC current is applied to both the stator and the rotor windings.
- Đồng hồ chạy bằng động cơ đồng bộ về nguyên tắc chính xác bằng tần số dòng của nguồn điện. (Mặc dù sự chênh lệch tần số nhỏ sẽ xảy ra trong vài giờ nhất định bất kỳ, các nhà điều hành lưới điện sẽ chủ động điều chỉnh tần số đường dây trong những khoảng thời gian sau đó để bù đắp, do đó giữ cho đồng hồ điều khiển bằng động cơ luôn chính xác; xem Tần số tiện ích # Ổn định.)/ A clock driven by a synchronous motor is in principle as accurate as the line frequency of its power source. (Although small frequency drifts will occur over any given several hours, grid operators actively adjust line frequency in later periods to compensate, thereby keeping motor-driven clocks accurate; see Utility frequency#Stability.)
- Ghi bàn xoay trình phát/ Record player turntables
- Tăng hiệu quả trong các ứng dụng tốc độ thấp/ Increased efficiency in low-speed applications
Kiểu phụ/ Subtypes
- Động cơ đồng bộ AC Polyphase/ AC Polyphase synchronous motors
- Động cơ bước (có thể đồng bộ hoặc không)/ Stepper motor (may be synchronous or not)
- Máy điện đôi rôto quấn không chổi than đồng bộ./ Synchronous brushless wound-rotor doubly-fed electric machine.
Động cơ đồng bộ | Synchronous motors và của hãng nào phù hợp với nhu cầu sử dụng của bạn
Khi đang cần tìm mua chính xác Động cơ đồng bộ | Synchronous motors phù hợp với nhu cầu đang cần, https://DienElectric.Com phân phối bán, với cách phân loại theo hãng: Siemens, ABB, AB, Eaton, B&R, Phoenix Contact, Schneider, Mitsubishi Electric, LS, ...; theo mục đích sử dụng; cung cấp đầy đủ, chi tiết, chính xác thông tin, cũng như những tư vấn chính xác, tận tình, và ngay lập tức sẽ cho bạn kết quả như ý muốn. Vì sự hài lòng của khách hàng chính là thành công của chúng tôi.
Động cơ đồng bộ | Synchronous motors đang được phân phối tại ANH TY Co., LTD | https://DienElectric.com
Động cơ SIMOTICS S-1FL6-1FL6, Điện áp hoạt động 3AC 400V Pn=7 kW; Nn=2000 vòng/phút M0=40 Nm; MN=33,4 Nm, Chiều cao trục..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ đồng bộ SIMOTICS S 1FK7-CT PN=3,8 kW; UDC=600 V M0=18 Nm (100K); NN=3000 vòng/phút; Thiết kế làm mát tự..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ không đồng bộ nhỏ gọn SIMOTICS M 1500 vòng/phút 22 kW 140 Nm 56 A 308 V 1750 vòng/phút 25 kW 136 Nm 56 A..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ hạ thế SIMOTICS SD, lồng sóc IEC, tự thông gió, cấp nhiệt độ IP55 155(F) phù hợp với 130 (B) IE2, vỏ gang 4 cực*..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ không đồng bộ nhỏ gọn SIMOTICS M 1500 vòng/phút, 142 kW, 904 Nm, 290 A, 340 V 1750 vòng/phút, 165 kW, 900..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ không đồng bộ nhỏ gọn SIMOTICS M 1500 vòng/phút, 382 kW, 2432 Nm, 730 A, 345 V 1750 vòng/phút, 445 kW, 2429..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ đồng bộ SIMOTICS S 1FT7, M0=65Nm (100K) NN=3000rpm, PN=15.10kW Thông gió cưỡng bức Kích thước khung IMB 5 (IM V1, IM V3)..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ không đồng bộ nhỏ gọn SIMOTICS M 1500 vòng/phút, 108 kW, 688 Nm, 225 A, 330 V 1750 vòng/phút, 125 kW, 682..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ đồng bộ SIMOTICS S 1FK7-HD PN=3.8kW; UDC=600V M0=28Nm (100K); NN=2000rpm; Làm mát tự nhiên KÍCH THƯỚC KHUNG IMB 5..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ không đồng bộ nhỏ gọn SIMOTICS M 1500 vòng/phút, 175 kW, 1114 Nm, 350 A, 340 V 1750 vòng/phút, 200 kW, 1091..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ không đồng bộ nhỏ gọn SIMOTICS M 1500 vòng/phút, 382 kW, 2432 Nm, 730 A, 345 V 1750 vòng/phút, 445 kW, 2429..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ không đồng bộ nhỏ gọn SIMOTICS M 1500 vòng/phút, 95 kW, 605 Nm, 200 A, 340 V 1750 vòng/phút, 110 kW, 600..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ không đồng bộ nhỏ gọn SIMOTICS M 1500 vòng/phút, 130 kW, 828 Nm, 270 A, 340 V 1750 vòng/phút, 135 kW, 737..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ không đồng bộ nhỏ gọn SIMOTICS M 1500 vòng/phút, 230 kW, 1464 Nm, 465 A, 340 V 1750 vòng/phút, 265 kW, 1446..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ điện áp thấp GP 1AV1063A, rôto lồng sóc IEC, tự làm mát, cấp nhiệt độ IP 55 155(F) theo vỏ nhôm..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ bánh răng xoắn ốc Z79-LE132 Premium Sản phẩm sẽ được cung cấp với nhãn hiệu sản phẩm Siemens hoặc Innomotics. trục rắn V40x 80..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Loại động cơ SIMOTICS XP, điện áp thấp 1CV3090B, rotor lồng sóc IEC, tự làm mát, cấp nhiệt độ IP55 155(F) theo tiêu..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ hạ thế lồng sóc SIMOTICS SD, IEC, tự thông gió, cấp nhiệt độ IP55 155(F) phù hợp với 130 (B) IE2, vỏ gang 2 cực*..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ điện áp thấp SIMOTICS GP 1AV3112B, rôto lồng sóc IEC, tự làm mát, cấp nhiệt độ IP55 155(F) theo vỏ..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ đồng bộ SIMOTICS S 1FT7, M0=7Nm (100K) NN=3000rpm, PN=1,76kW Làm mát tự nhiên Kích thước khung IMB 5 (IM V1, IM..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
SIMOTICS S Động cơ đồng bộ 1FT7, M0=7Nm (100K) NN=4500rpm, PN=1.32kW Làm mát tự nhiên Kích thước khung IMB 5 (IM V1, IM..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ đồng bộ SIMOTICS S 1FK7-CT PN=7,7 kW; UDC=600 V M0=48 Nm (100K); NN=2000 vòng/phút; thiết kế làm mát tự..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ đồng bộ SIMOTICS S 1FT7, M0=35Nm (100K) NN=3000rpm, PN=11.00kW, làm mát bằng nước, Kích thước khung IMB 5 (IM V1, IM..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ SIMOTICS GP: Động cơ điện áp thấp 1AV4131A, rôto lồng sóc theo tiêu chuẩn IEC, tự làm mát, cấp nhiệt..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ đồng bộ SIMOTICS S 1FK7-CT PN=2.3kW; UDC=600V M0=11Nm (100K); NN=3000 vòng/phút; thiết kế làm mát tự nhiên..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ đồng bộ SIMOTICS S Synchronous motor 1FK7-CT PN= 8.2kW UDC= 600V M0= 48Nm (100K) NN= 3000rpm .....Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Trục rỗng có đĩa co HS50 - Tỷ số mô men xoắn: 42,41 Vị trí lắp M5 Dầu CLP VG220 Bảo vệ bề mặt C1 cho môi trường bình..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
chỉ có phiên bản Ex! động cơ điện áp thấp, rôto lồng sóc, IP55 2 cực * kích thước 90L, * cấp nhiệt độ 155 (F)..Giá lẻ: Call Giá tốt nhất xem...0909186879Email
Động cơ điện áp thấp SIMOTICS SD, lồng sóc IEC, tự thông gió, cấp nhiệt độ IP55 155 (F) phù hợp với 130 (B) IE2, vỏ..Giá lẻ: Call Giá tốt nhất xem...0909186879Email

 dienelectrics@gmail.com
dienelectrics@gmail.com 0909186879
0909186879 

 GermanyCó Discount
GermanyCó Discount 489
489 GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount ChinaCó Discount
ChinaCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount ChinaCó Discount
ChinaCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount NN= 2000rpm PN= 7.96kW Làm mát tự nhiên") GermanyCó Discount
GermanyCó Discount NN=3000rpm") GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount GermanyCó Discount
GermanyCó Discount ChinaCó Discount
ChinaCó Discount










